Publications
← visit my google scholar
International
Journal (In preparation)
Journal (Under review)
Jinwook Park, Changyu Lee, Jinwhan Kim*

Kiyong Park, Changyu Lee, Jinwhan Kim*
Paper
Jinwook Park, Changyu Lee, Jinwhan Kim*
Changyu Lee, Kiyong Park, Jinwhan Kim*
Journal (Published)
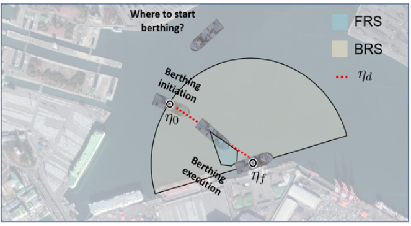
[J9] Safety-Guaranteed Ship Berthing using Cascade Tube-based Model Predictive Control
IEEE Transactions on Control Systems Technology (TCST), 32(4), 1504-1511, 2024.07
Changyu Lee, Quoc Van Tran, Jinwhan Kim*
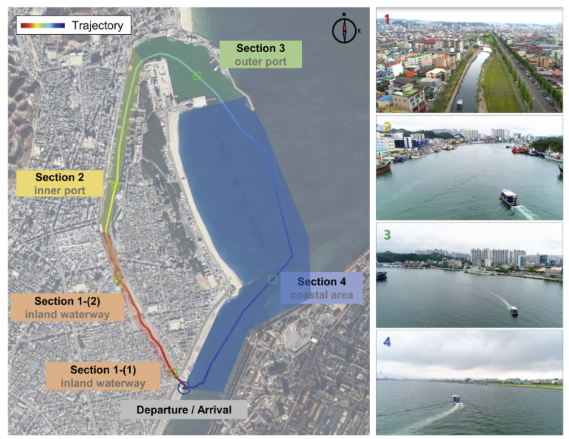
[J7] Field experiment of autonomous ship navigation in canal and surrounding nearshore environments
Journal of Field Robotics (JFR), 41(2), 470-489, 2023.11
Jonghwi Kim, Changyu Lee, Dongha Chung, Yonghoon Cho, Jinwhan Kim*, Wangseok Jang, Saeyong ParkEditor's Choice at Science Robotics
[J5] Navigable Area Detection and Perception-guided Model Predictive Control for Autonomous Navigation in Narrow Waterways
IEEE Robotics and Automation Letters (RA-L), 8(9), 5456-5463, 2023.09
(Presented at IEEE ICRA 2024)
($^\dagger$: equally contributed)
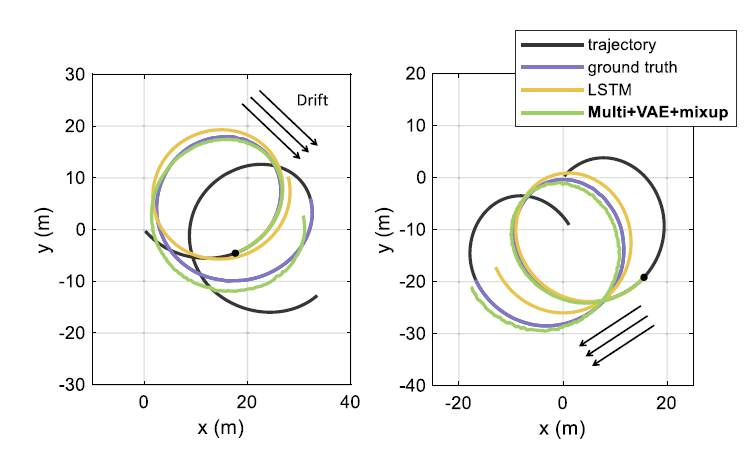
[J4] A learning-based approach to surface vehicle dynamics modeling for robust multistep prediction
Autonomous Robots, 47(6), 797-808, 2023.06
Junwoo Jang, Changyu Lee, Jinwhan Kim*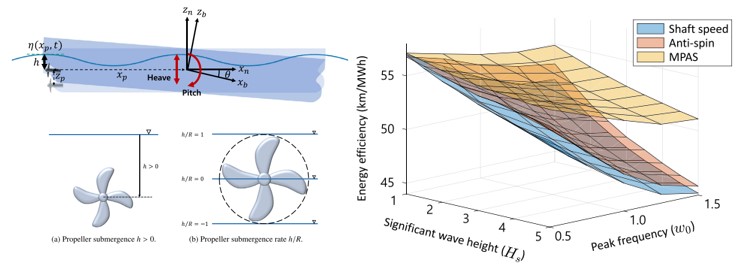
[J3] Model Predictive Anti-spin Thruster Control for Efficient Ship Propulsion in Irregular Waves
Control Engineering Practice, 136, 105533, 2023.07
Changyu Lee, Jinwhan Kim*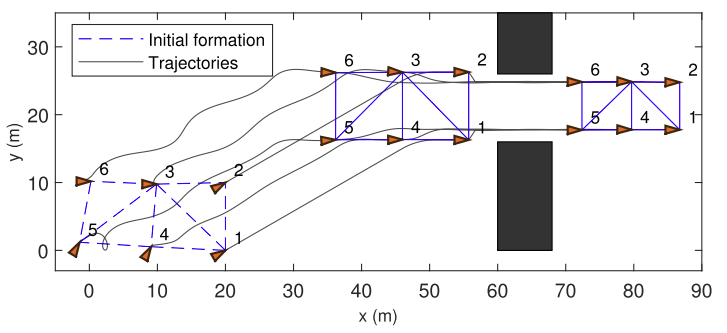
[J2] Robust Bearing-based Formation Tracking Control of Underactuated Surface Vessels: An Output Regulation Approach
IEEE Transactions on Control of Network Systems, 10(4), 2048-2059, 2023.12
Quoc Van Tran*, Changyu Lee, Jinwhan Kim, Hoang Quang Nguyen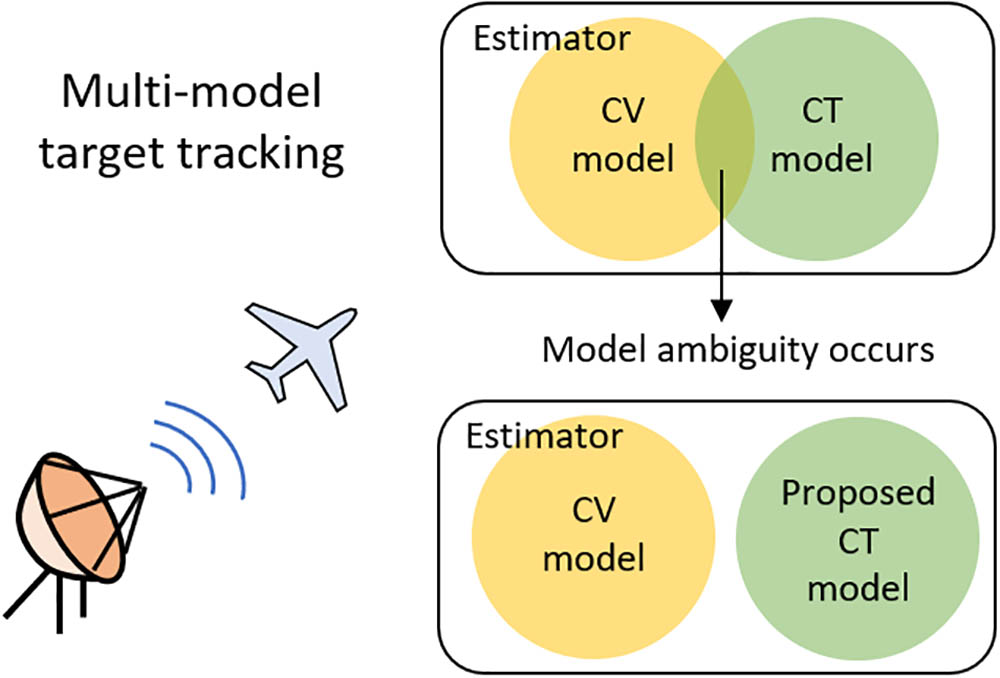
[J1] Ambiguity Resolution Between Constant Velocity and Coordinated Turn Models for Multimodel Target Tracking
IEEE Sensors Letters, 6(5), 1-4, 2022.05
Junwoo Jang, Changyu Lee, Jinwhan Kim*Conference
[C7] Robust Trajectory Tracking for Surface Vehicles via L1-Augmented Model Predictive Control
Oceans, 2025
Kiyong Park, Changyu Lee, Jinwhan Kim*[C6] Parameter-Varying Koopman Operator for Nonlinear System Modeling and Control
62nd IEEE Conference on Decision and Control (CDC), pp. 3700-3705, 2023.12.13-15
Changyu Lee, Kiyong Park, Jinwhan Kim*[C5] Robust Ship Berthing Control with Wind Disturbance Compensation using Reachability Analysis
22nd IFAC World Congress, 56(2), 4358-4363, 2023.07.09-14
Jinwook Park, Changyu Lee, Jinwhan Kim*[C4] Robust Path Tracking and Obstacle Avoidance of Autonomous Ship using Stochastic Model Predictive Control
20th International Conference on Ubiquitous Robots (UR), pp. 179-182, 2023.06.25-28
Kiyong Park, Changyu Lee, Jinwhan Kim*[C3] Robust Path Tracking and Obstacle Avoidance Using Tube-Based Model Predictive Control for Surface Vehicles
14th IFAC Conference on Control Applications in Marine Systems, Robotics, and Vehicles (CAMS), 55(31), 301-306, 2022.09.14-16
Changyu Lee, Quoc Van Tran, Jinwhan Kim*[C2] Energy Efficient Control for Electric Ship Propulsion Considering Thrust Fluctuation in Regular Waves
13th IFAC Conference on Control Applications in Marine Systems, Robotics, and Vehicles (CAMS), 54(16), 364-369, 2021.09.22-24
Changyu Lee, Jinwhan Kim*[C1] Nonlinear Model Predictive Control of an Autonomous Underwater Vehicle for Terrain Profile Tracking
16th International Conference on Ubiquitous Robots (UR), pp. 771-774, 2019.06.24-27
Changyu Lee, Jinwhan Kim*Domestic
Journal
이찬규, 김진환*, “Trajectory Optimization for Autonomous Berthing of a Twin-Propeller Twin-Rudder Ship”, Journal of Ocean Engineering and Technology (한국해양공학회지), 37(3), 122-128, 2023.06.30
이찬규, 김경서, 김진환*, “2023 MBZIRC Maritime Grand Challenge 대회 소개”, 로봇과 인간, 19(2), 32-37, 2022.04
이찬규, 장준우, 김진환*, “Stochastic model predictive control for motion control of an underactuated underwater vehicle”, Journal of Institute of Control, Robotics and Systems (제어로봇시스템학회지), 26(5), 373-378, 2020.05
Conference
김응현, 이찬규, 김진환*, “혼잡한 보행자 공간에서 운용되는 모바일 로봇 자율주행을 위한 경로계획”, 한국로봇학회 한국로봇종합학술대회, 2024 ${\color{red}{\text{ (Most Outstanding Paper Award)}}}$
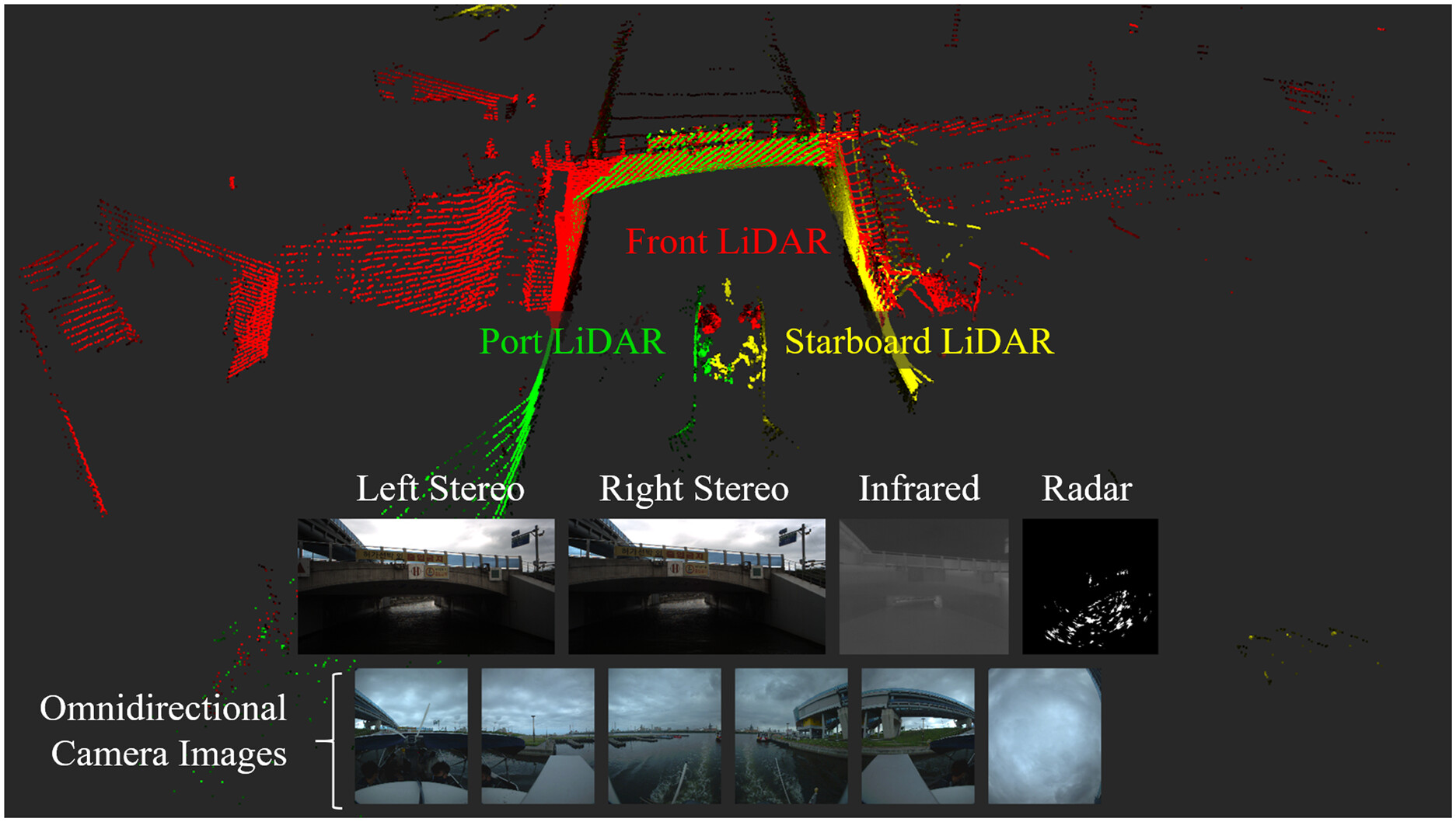
정동하, 김종휘, 이찬규, 김진환*, “자율운항 연구를 위한 다중 센서 데이터 소개”, 한국해양공학회, 2023
김종휘, 정동하, 이찬규, 김진환*, “가항영역 탐지를 통한 운하 환경에서의 자율 경로 생성”, 대한조선학회, 2023
박기용, 이찬규, 김진환*, “비선형 모델 예측 제어 기법을 이용한 두 개의 전방향 추진기를 갖는 선박의 자동 접안”, 한국로봇학회 한국로봇종합학술대회, 2023. 02.
이찬규, 김진환*, “선박을 위한 강인한 모델예측제어기반 경로 추종 및 장애물 회피”, 제어로봇시스템학회, 2022. 06.
이찬규, 김진환*, “불규칙파 중 전기추진선박의 에너지 효율 향상을 위한 모델예측제어”, 한국해양과학기술협의회 공동학술대회, 2022.06.
이찬규, 정동하, 김종휘, 조용훈, 김진환*, 최휘용, 이준식, “포항 운하에서의 자율 운항 실험을 위한 최적 경로 추종”, 대한조선학회 추계학술대회, 2021.11.
김종휘, 정동하, 이찬규, 조용훈, 김진환*, 장왕석, 박세용, “포항 운하에서의 자율 운항 실험을 위한 다중 센서 융합”, 한국해양공학회 추계학술대회, 2021.10.
이찬규, 김진환*, “파랑 중 전기추진선박의 에너지 효율 향상을 위한 모델예측제어”, 한국해양과학기술협의회 공동학술대회, 2021.05.
이찬규, 김진환*, “쌍축 쌍타 선박의 자동접안을 위한 모델예측제어”, 한국해양과학기술협의회 공동학술대회, 2020.07. ${\color{red}{\text{ (Outstanding Student Paper Presentation Award)}}}$
장준우, 이찬규, 김진환*, “표적 운동 추정 과정에서의 다중모델 기반 필터의 모호성 해결”, 제어로봇시스템학회, 2019. 05.
김종휘, 김근환, 이찬규, 김진환*, 이필엽, “단안 카메라 영상을 이용한 합성곱 신경망 기반 선박 탐지 및 추적”, 한국해양공학회 추계학술대회, 2018.11.